
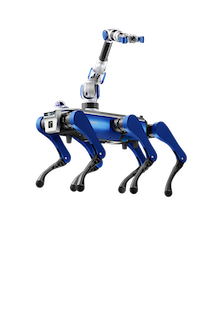
越疆探索者六足仿生機器人是一款融合高平穩性、低噪音、強負載與多地形適應能力的六足移動平臺,突破傳統移動平臺局限,支持模塊化擴展與多類型場景任務執行,是面向教育科研、行業巡檢與智能服務場景的下一代多足智能載體。

交叉三足著地步態形成天然穩定的三角支撐結構,動態重心控制技術和抗干擾步態模式實時減少姿態波動,實現自主脫困,具備強大的穩定性、抗側翻性、抗沖擊性,適用于濕滑地面、不平整地面行走任務。

天然低沖擊步態使動作控制更輕盈,無需頻繁跺地維穩,大幅減少腳步沖擊聲。大力矩、低噪音電機設計結合降噪控制算法,具備圖書館級靜音水平(≤55dB*),顯著減少噪音污染,營造人機共存的和諧氛圍。
*測試環境:薄地毯地面
*測試距離:分貝儀距離產品約1m

腿部結構與機身支撐架構采用輕量化高強度材料與大扭矩電機設計,可拉動自身重量 5 倍物體*,可搭載專屬機械臂及拓展多傳感器組合、科研儀器、勘測設備等,實現移動作業、交互操作與精準執行任務。
*負載以實際測試為準

融合 IMU、本體力感知、高精度激光雷達、深度視覺相機等配置的 AI 地形識別與運動控制算法,更靈活的接地策略,可自適應調整姿態與步態節奏,多關節快速協同響應,輕松應對各類不同離散地形。
| 項目 | 備注 |
| 六足機器狗 | 標配,含深度相機、激光雷達、內置電池、適配器和無線遙控手柄。 |
| 遠距離操控與圖傳套件 | 可選配(Optional) *后期推出 |
| 無線自動充電套件 | 可選配(Optional) *后期推出 |
| 協作機械臂套件 | 可選配(Optional) *后期推出 |
| 參數 | |
| 長×寬×高(站立尺寸) | 86.3cm × 47cm × 48cm |
| 長×寬×高(折疊尺寸) | 73.4cm × 47cm × 24.4cm |
| 自由度(DOF) | 18 |
| 整機重量 | 本體約20kg,含包裝約30Kg |
| 最大行走速度 | 1.8m/s |
| 最大越障高度 | 20cm |
| 最大斜坡適應角度 | 40° |
| 負載能力 | 額定10kg,極限15kg |
| 關節運動空間 | 前中髖關節:-60°~180° |
| 后髖關節:-60°~239° | |
| 小腿:-30°~-160° | |
| 機身:±38° | |
| 電池容量 | 504wh |
| 續航時間 | 2.5 小時 |
| 標配功能 | 行走、上下坡、上下樓梯、越障、避障、扭腰、下蹲等; 適應草地、沙地、濕地、平地、碎石地等場景 (*具體以實測為準) |
| 電機峰值扭矩 | 33Nm(膝關節) |
| 噪音等級 | 運動噪音≤55dB *測試環境:室內薄地毯,分貝儀距離1米左右 |
| 運控平臺架構 | X86_64架構 |
| CPU: 酷睿i7/i5,6核?16線程 | |
| 算?平臺 | GPU算?:40TOPS |
| 揚聲器 | 支持 |
| 激光雷達 | Livox Mid360 |
| 深度相機(RGB-D) | Realsense D435 |
| 外部擴展 | 支持協作機械臂擴展(*后期支持) 支持遠距離遙控圖傳(*后期支持) 支持無線自動充電(*后期支持) |
| 二次開發 SDK | |
| 項目 | 描述 |
| 操作系統 | Ubuntu 22.04、預裝ROS2 Humble 版本系統 |
| 控制接口類型 | ROS2、底層和高層SDK(Python/c++) |
| 數據接口 | 實時傳感器數據、運動狀態反饋、IMU、電機關節數據等 |
| 自定義算法接入 | 支持自定義的運動控制算法、地形識別算法、路徑規劃算法等模塊級接入 |
| 第三方硬件支持 | 支持外掛激光雷達、深度相機、語音模組、邊緣計算盒、協作機械臂等 |
| 文檔與工具支持 | 提供詳細開發文檔、仿真環境(ROS2、MuJoCo)、調試工具、接口例程 |
| *產品顏色、型號規格及技術指標等如有變更,以實物為準,恕不另行通知。 *本產品僅用于民用/商業/科研教育用途,且使用時請遵守各地區法律法規。 |
|





 汽車制造
汽車制造
 3C電子
3C電子
 金屬加工
金屬加工
 新零售
新零售
 食品飲料
食品飲料
 化工
化工
 醫療手術
醫療手術
 半導體
半導體
 科研
科研
 教育
教育
 自動化焊接
自動化焊接
 碼垛
碼垛
 上下料
上下料
 無序分揀
無序分揀
.svg) 點涂膠
點涂膠
 視覺檢測
視覺檢測
 裝配
裝配
 搬運
搬運
 PCB 插件
PCB 插件
 打磨拋光
打磨拋光
 螺絲鎖付
螺絲鎖付
